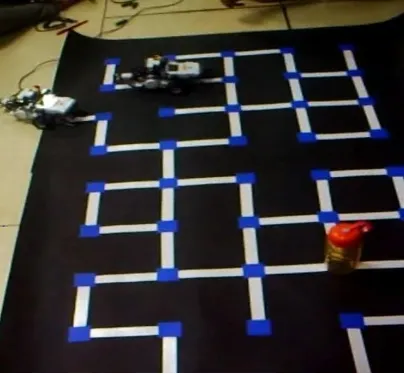
15 IMPLEMENTASI ALGORITMA BREADTH FIRST SEARCH DAN OBSTACLE DETECTION DALAM PENELUSURAN LABIRIN DINAMIS MENGGUNAKAN ROBOT LEGO Budianto
Teks penuh
Gambar

Dokumen terkait
Isi laporan yakni menjabarkan Perkiraan teoretik yang melandasi aktivitas penciptaan yang membimbing kearah penciptaan, Metode yang dilakukan dalam menciptakan karya
perangkat daerah kabupaten Sikka sesuai Peraturan Pemerintah Nomor 41 Tahun 2007 tentang Organisasi Perangkat Daerah dan Peraturan Menteri Dalam Negeri Nomor 46 Tahun 2008
braunii yang dikultivasi selama 6 hari pada perlakuan dengan konsntrasi air kelapa 0% memiliki kuantitas paling rendah, yakni hanya 2,81% kandungan lipid,
Dari 6 indeks validasi untuk mengetahui jumlah pengelompokan yang tepat, menunjukkan bahwa pengelompokan menjadi 2 kelompok memberikan hasil pengelompokan yang lebih bagus
Proses data latih digunakan untuk menyimpan referensi tulisan manusia, langkah pertama yaitu user melakukan sampling dengan cara menulis pada kertas kemudian data
(i) aplikasi pembelian Unit Penyertaan MANDIRI INVESTA PASAR UANG dari Pemegang Unit Penyertaan telah lengkap dan diterima dengan baik oleh Manajer Investasi
Ketika kantong pos datang para pengirim yang berasal dari MPC bandung meminta keterangan bahwa pengiriman telah sampai dengan ditandai dengan cap dan tanda tangan
Sedangkan pada pemberian takaran amelioran dregs 40 ton/ha terjadi penurunan berat gabah bernas, karena pemberian takaran amelioran dregs terendah 20 ton/ha terlihat
