Estimasi Inflasi Wilayah Kerja KPwBI Malang Menggunakan ARIMA-Filter Kalman dan VAR-Filter Kalman
Teks penuh
Gambar


Dokumen terkait
Pada kasus lintasan yang dibangun dengan sistem persamaan dinamik gerak AUV, metode Ensemble Kalman Filter menghasilkan estimasi yang lebih bagus dibandingkan dengan metode Fuzzy
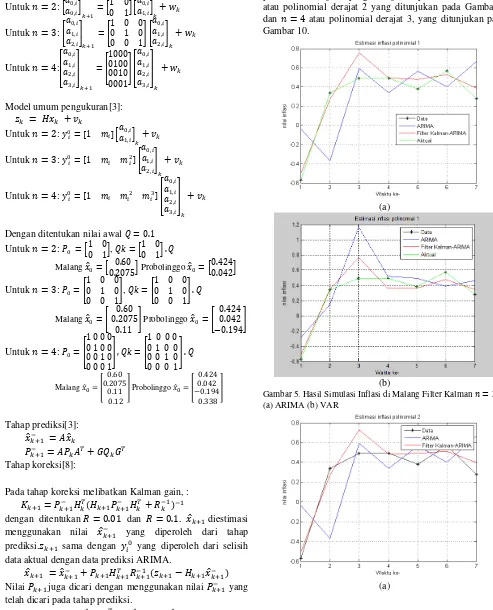
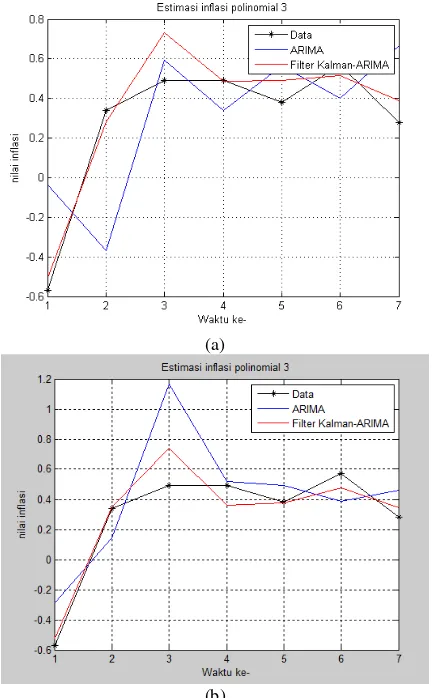
Berdasarkan hasil simulasi, dapat disimpulkan bahwa Kalman Filter dapat digunakan untuk mengestimasi parameter model ARIMA dan model yang parameternya diestimasi menggunakan
Dari hasil analisa pada simulasi dengan 100 dan 200 iterasi didapatkan memiliki error kurang dari 1%, sehingga metode Kalman Filter dapat digunakan sebagai salah satu metode
Dari hasil analisa pada simulasi dengan 100 dan 200 iterasi didapatkan memiliki error kurang dari 1%, sehingga metode Kalman Filter dapat digunakan sebagai salah satu metode
Pada optimal smoothing Kalman Filter, hanya variabel kecepatan translasi ke atas, kecepatan sudut pitch dan sudut pitch yang dapat memberikan hasil estimasi lebih halus daripada
bahwa ketika nilai ensemble 300 dan kovarian model sistem dan model pengukuran 0,01 , hasil estimasi dari metode Kalman Filter lebih mendekati sistem real daripada
Pada gambar 5.4 terlihat bahwa garis estimasi posisi kalman filter (hijau) hampir sama persis dengan garis lintasan real (merah) dengan nilai error (RMSE) sumbu x 3,42%
Ensemble Kalman Filter digunakan untuk mengestimasi sistem nonlinier dengan membangkitkan sejumlah ensemble sebagai inisialisasi untuk menghitung nilai mean dan kovarian error
