ROBOT PENGIKUT CAHAYA ( LIGHT FOLLOWER ).
Teks penuh
Gambar

Garis besar
Dokumen terkait
Dari hasil pengujian enam kali dengan berbagai macam rintangan dan posisi sumber cahaya yang dilakukan dalam Tugas Akhir ini (medan 2x2 m 2 ) menunjukkan bahwa robot bor
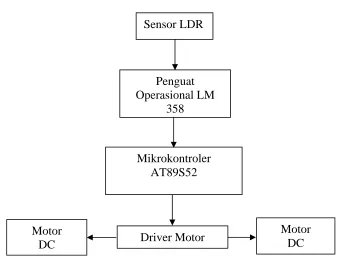
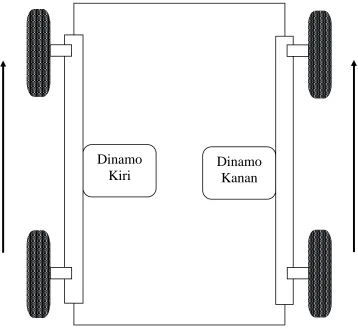
sehingga Robot Light Follower dapat bergerak mengikuti perbedaan intensitas cahaya pada ke tiga sensor kiri, tengah, kanan.. Apabila robot berbelok kiri, maka motor kanan
Menyatakan dengan sesungguhnya bahwa Laporan Akhir yang telah saya buat dengan judul “ PENGGUNAAN POTENSIOMETER SEBAGAI SENSOR POSISI PADA LENGAN ROBOT BERJARI PENGIKUT
Robot pengikut garis yang dirancang ini bekerja pada saat sensor membaca garis dan mengirim signal ke komparator sebagai pembanding dan diterima oleh
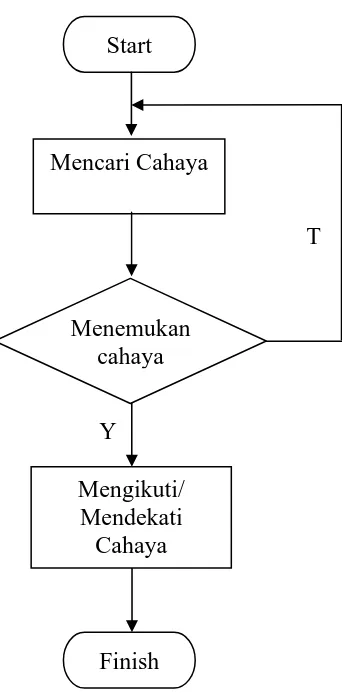
Tujuan utama dari tugas akhir ini adalah menggunakan metode kendali yang baik agar robot bisa mendeteksi adanya cahaya dan dapat menghindari rintangan di depan
Robot pengikut garis yang dirancang ini bekerja pada saat sensor membaca garis dan mengirim signal ke komparator sebagai pembanding dan diterima oleh
Dari penelitian ini didapatkan hasil berupa rancang bangun robot line follower berbasis cahaya tampak dengan desain mekanik sensor lurus berdampingan dimana jarak
Sedangkan untuk proses pengolahan citra, mulai dari pengambilan citra hingga menghasilkan parameter nilai kontrol untuk kemudi dan kecepatan robot pengikut, dapat dilihat pada Gambar 2
