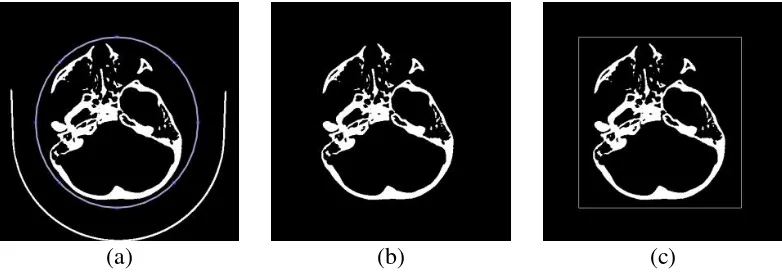
DETEKSI PERMUKAAN LUAR TULANG TENGKORAK PADA CITRA CT MENGGUNAKAN
Teks penuh
Gambar




Dokumen terkait
Sarung tangan yang kuat, tahan bahan kimia yang sesuai dengan standar yang disahkan, harus dipakai setiap saat bila menangani produk kimia, jika penilaian risiko menunjukkan,
Determinan atau faktor-faktor penentu pengungkapan tanggungjawab sosial yang diuji pada penelitian tersebut adalah faktor represi sipil dan politik suatu negara,
Intinya disni saya ingin mengatakan bahwa, tidak ada batasan usia dalam berbisnis, dengan kata lain jika kita ingin belajar cara menjadi pengusaha muda sejak mahasiswa pun juga
Berdasarkan Pasal 472 Kitab Undang-Undang Hukum Dagang (KUHD) yang berbunyi “Kerugian yang harus dibayar oleh si pengangkut yang disebabkan karena barang yang
(B) OSIS SMA Merah Putih beritahukan kepada siswa-siswi SMA Merah Putih bahwa OSIS akan mengada- kan lomba pidato dalam rangka memperingati hari Sumpah Pemuda, Sabtu,
Salah satu sifat yang mesti diwujuddkan dalam kehidupan sehari-hari ialah saling menghargai kepada sesama manusia dengan berlaku sopan, tawadhu, tasamuh,
Aktivitas siswa selama proses pembelajaran di kelas dilakukan pada saat kegiatan pembelajaran dengan cara mengisi lembar observasi yang telah disediakan. Hasil yang
Respon guru terhadap hasil pengembanganmedia permainan (game) monopoli pada pembelajaran fisika materi besaran dan satuan , kelas VII/6 di SMPN 6 Banda Aceh diketahui
