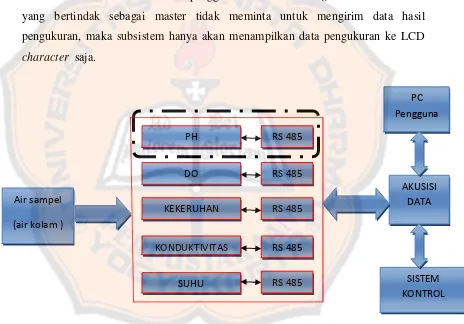
TUGAS AKHIR ALAT UKUR KADAR KEASAMAN PADA SISTEM MONITORING KUALITAS AIR KOLAM IKAN
Teks penuh
Gambar
![Tabel 2.1. Hubungan antara pH Air dan Kehidupan Hewan (ikan) Budidaya [6]](https://thumb-ap.123doks.com/thumbv2/123dok/1794621.2097662/23.595.96.532.293.582/tabel-hubungan-ph-air-kehidupan-hewan-ikan-budidaya.webp)


Dokumen terkait
Diajukan untuk Memenuhi Sebagian dari Syarat Memperoleh Gelar Sarjana Pendidikan Program Studi Pendidikan Guru Sekolah
kuartal ketiga tahun 2017 sehingga menghasilkan Laba Bersih sebesar Rp 67 miliar atau tumbuh sebesar 47% dibandingkan dengan periode yang sama tahun sebelumnya. Sebagai hasil dari
Hasil dari pengujian yang telah dilakukan sebelumnya pada hipotesis ketiga mengindikasikan bahwa status pernikahan tidak memiliki pengaruh signifikan terhadap
2 Maeylani Putri Qarisma SMPN 1 Pilangkenceng 97 Perwakilan 2. 3 Wahyu Shesar Agustin SMPN 1
Analisa Rietveld dapat mengidentifikasi transformasi fasa Ti ( α - β ) dan mampu menyajikan optimasi data hasil pengujian difraksi sinar-x berupa peak broadening atau
• Membekali remaja yg aktif scr seksual dg pengetahuan, keterampilan utk melindungi diri mereka & partnernya melawan infeksi HIV sngt penting utk mengerem tjdnya epidemi
Keterangan Respon Primer Respon Sekunder Hubungi Situasi yang berpotensi mengancam nyawa dan memerlukan respon dari tim medis Informasikan adanya kegawat daruratan
Semakan Audit mendapati peruntukan yang diterima daripada Kerajaan Negeri sejumlah RM2.97 juta oleh TADC telah digunakan untuk membiayai penyediaan infrastruktur seperti
