Rancang Bangun Dan Analisa Sistem Kendali PID Pada Unmanned Aerial Vehicle (UAV) Fixed Wing - ITS Repository
Teks penuh
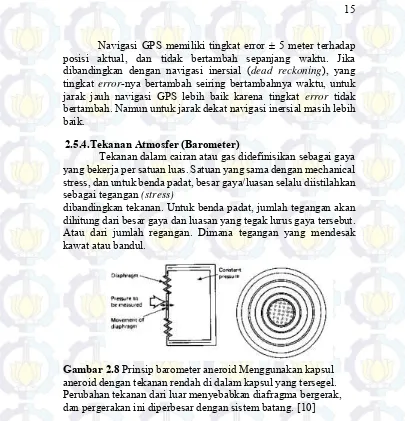
Gambar
![Gambar 2.1 Grafik step respon system [2]](https://thumb-ap.123doks.com/thumbv2/123dok/1773896.2093837/23.420.6.413.29.566/gambar-grafik-step-respon-system.webp)
![Gambar 2.2 Block Diagram sederhana dari suatu sistem [2]](https://thumb-ap.123doks.com/thumbv2/123dok/1773896.2093837/24.420.4.412.25.581/gambar-block-diagram-sederhana-dari-suatu-sistem.webp)
![Gambar 2.4 ArduPilot-Mega 2.5 [11]](https://thumb-ap.123doks.com/thumbv2/123dok/1773896.2093837/27.420.4.413.33.468/gambar-ardupilot-mega.webp)
![Gambar 2.5 Pergerakan 6 derajat Fixed wing [10]](https://thumb-ap.123doks.com/thumbv2/123dok/1773896.2093837/28.420.7.420.29.561/gambar-pergerakan-derajat-fixed-wing.webp)
![Gambar 2.6 Giroskop terpasang pada gimbal [10]](https://thumb-ap.123doks.com/thumbv2/123dok/1773896.2093837/29.420.3.414.35.576/gambar-giroskop-terpasang-pada-gimbal.webp)
![Gambar 2.9 Motor DC Brushless [14]](https://thumb-ap.123doks.com/thumbv2/123dok/1773896.2093837/31.420.3.413.34.578/gambar-motor-dc-brushless.webp)
![Gambar 2.10 Motor DC servo [10]](https://thumb-ap.123doks.com/thumbv2/123dok/1773896.2093837/32.420.7.415.29.576/gambar-motor-dc-servo.webp)
![Gambar 2.12 Radio Control dan Receiver [14]](https://thumb-ap.123doks.com/thumbv2/123dok/1773896.2093837/33.420.7.417.25.568/gambar-radio-control-dan-receiver.webp)
![Gambar 2.13 Aliran udara disekitar sayap [12]](https://thumb-ap.123doks.com/thumbv2/123dok/1773896.2093837/34.420.0.413.32.585/gambar-aliran-udara-disekitar-sayap.webp)
Dokumen terkait
Dalam mode ini sensor sonar EZ1 menjadi acuan utama dalam system kontrol, system control altitude menggunakan control PID Hasil penelitian berupa eksperimen yang telah dilakukan,
Untuk data persen error tiap percobaan, pada tabel diatas persen error mengindikasikan tingkat kesalahan MAV Quadcopter dalam mempertahankan altitude atau
Pada bab ini akan dijelaskan beberapa metode penelitian yang akan digunakan untuk mencapai tujuan penelitian yaitu studi literatur, melakukan analisa kestabilan dari setiap
Data yang diambil dalam penelitian tugas akhir ini meliputi data pengujian komponen, analisa sistem kontrol PID, output daya photovoltaic dari tracker dan fixed .Selain
Dalam mode ini sensor sonar EZ1 menjadi acuan utama dalam system kontrol, system control altitude menggunakan control PID Hasil penelitian berupa eksperimen yang telah dilakukan,
Sesuai dengan skenario pengujian, pada tahap pengujian luar ruangan wahana quadcopter akan terbang bebas tanpa diikat untuk melihat sampai sejauh mana wahana
Kesalahan posisi sudut dari sirip aileron dan rudder ini akan mengakibatkan gerakan roll dan yaw pada pesawat terbang tanpa awak yang tidak sesuai dengan yang
Rancang Bangun dan Analisa Sistem Kendali PID Pada Unmanned Aerial Vehicle UAV Fixed Wings, Tugas Akhir, Institut Teknologi Sepuluh Nopember Surabaya, Surabaya.. Siriouris George,”
