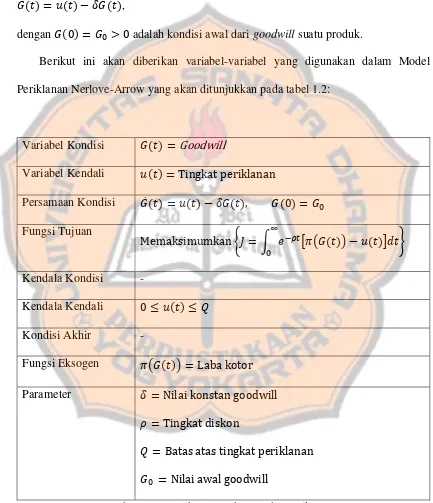
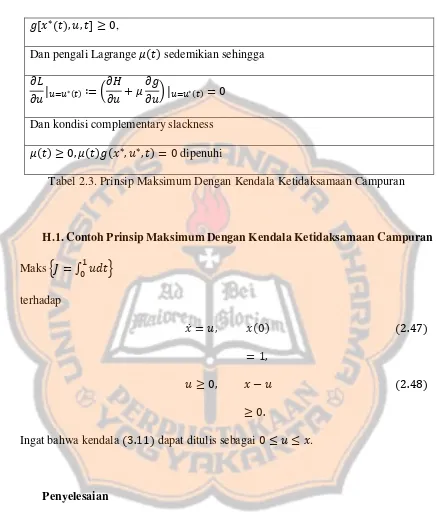
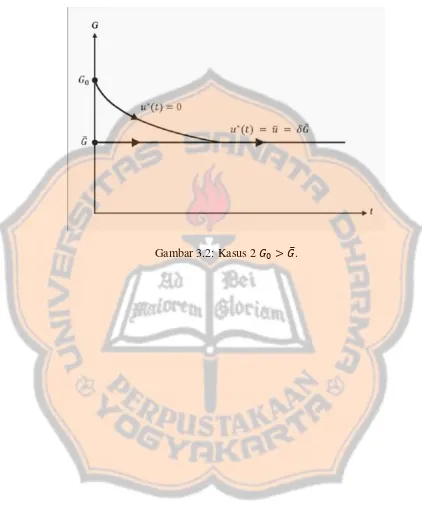
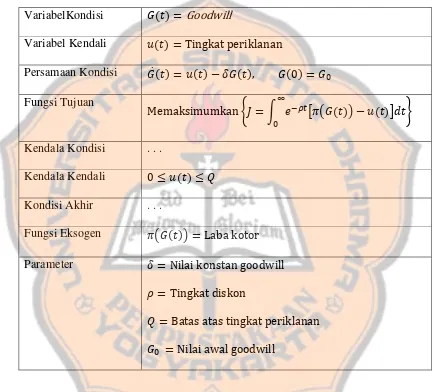
Kendali optimal pada model periklanan Nerlove Arrow dengan menggunakan prinsip maksimum
Teks penuh
Gambar

Dokumen terkait
Dari hasil pengujian dengan regresi yang dilakukan terhadap variabel atribut produk (X1) dan WoM (X2) berpengaruh positif signifikan secara parsial terhadap Keputusan
Magnetorquer adalah aktuator yang menghasilkan momen magnetik yang dihasilkan dari lilitan kawat yang dililitkan pada bagian dalam komponen satelit nano sehingga magnetorquer
Hal ini disebabkan karena pada metode Bagging CART ada pembangkitan learning sampel yang akan mereduksi variansi atribut predictor, sehingga ketika dikombinasikan
Hal ini sesuai dengan penelitian yang menyatakan bahwa penggunaan bahan ajar/ modul berbasis kearifan lokal dalam meningkatkan hasil belajar kognitif peserta didik
Penerapan laporan biaya lingkungan memberikan manfaat bagi manajemen dalam memperoleh informasi tentang biaya lingkungan yang telah dikeluarkan pada suatu periode serta mengetahui
Hasil penelitian menunjukan bahwa Hasil penelitian menunjukan bahwa Kejaksaan Negeri Mataram dalam melakukan pelaksanaan pemusnahan barang bukti yang telah
Laki-laki penderita haemofili menikah dengan wanita normal yang ayahnya haemofili, maka kemungkinan prosentase fenotip anak laki-lakinya yang normal dan yang
Tujuan dari penelitian ini adalah untuk mencari pola hubungan antara tingkat keselamatan lalu- lintas jalan raya yang diwakili oleh angka kecelakaan dan kondisi lalu-lintas
