PEMETAAN KONTUR LINGKUNGAN PADA MOBILE ROBOT MENGGUNAKAN WIIMOTE
Teks penuh
Gambar


Dokumen terkait
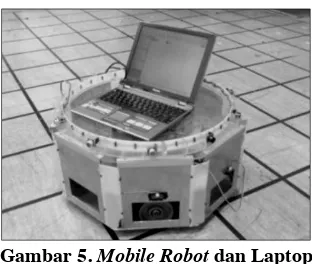
Hasil yang diperoleh dari penelitian ini adalah sistem mobile robot yang embedded dalam hal pengendalian maupun pengenalan gambar arah anak panah, juga mobile robot
Gambar 6 dan Gambar 7 melihatkan arah pergerakan robot sesuai dengan target posisi compass pembacaan nilai compass yang dituju selisih errornya tidak terlalu jauh
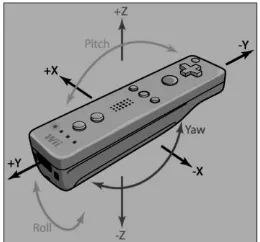
Abstrak – Pada paper ini akan dirancang mobile robot dengan kemampuan mengatur arah gerak menuju arah yang dituju menggunakan compass sebagai penentu arah,
Implementasi skeletal tracking dalam sistem navigasi mobile robot dilakukan dengan mengakses titik sendi pada bagian tangan untuk memberikan pola isyarat gerakan tangan
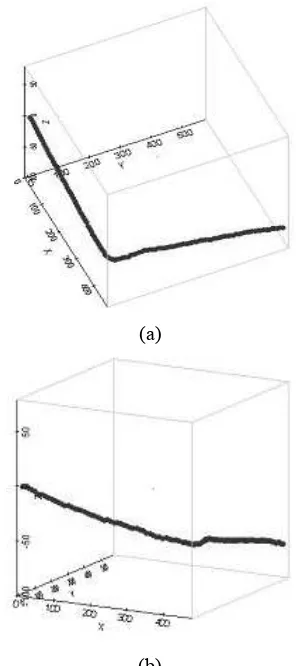
Uji coba ini dilakukan dengan cara melakukan perbandingan antara jarak geodesic antar tiap pasang titik pada permukaan 3 dimensi dengan jarak euclidean antar tiap pasang titik pada
Proses ekstraksi kontur mata yang dilakukan Gradient Vector Flow Snake sangat dipengaruhi hasil template matching untuk penentuan inisialisasi kontur dengan hasil cukup baik
akan memberikan pengaruh pada posisi terakhir robot dan generate titik bantu serta proses AG yang baru untuk menghasilkan individu baru yang sesuai dengan
Pada pengujian batterai Mobile Robot ini dilakukan dua pengujian diantaranya : untuk mengetahui beberapa lama durasi yang dibutuhkan oleh panel surya saat mengisi
