HALAMAN JUDUL - Perancangan Inverse Kinematics Robot Manipulator 4 Degree Of Freedom - ITS Repository
Teks penuh
Gambar
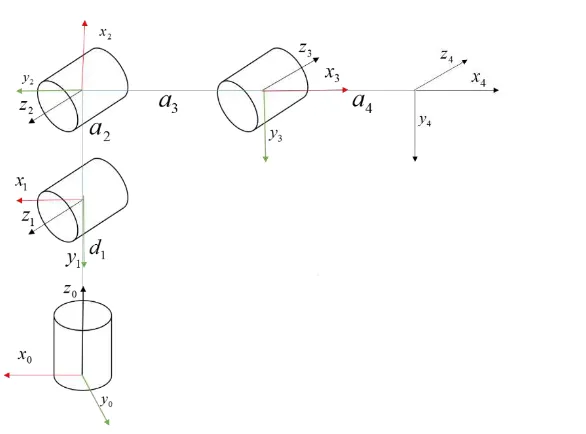
![Gambar 2.3 Cara untuk menentukkan parameter αi dan θi [6]](https://thumb-ap.123doks.com/thumbv2/123dok/1824193.2101504/27.420.83.323.377.498/gambar-cara-untuk-menentukkan-parameter-ai-thi.webp)


Dokumen terkait
Dengan ini saya menyatakan bahwa isi sebagian maupun keseluruhan Tugas Akhir saya dengan judul “ Pengendalian Posisi Sudut Joint Robot Manipulator 4 Degree of
Perbandingan antara jumlah Neuron dalam Hidden Layer Neural Network dengan Error Jarak untuk mendapatkan solusi kinematika balik manipulator robot dari titk berangkat
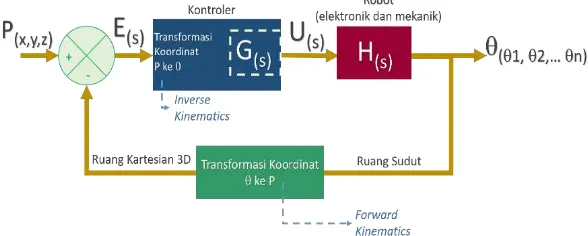
Pada penelitian kali ini metode ini digunakan untuk mencari posisi dari robot apabila robot di rotasi terhadap sumbu x dan y output dari kontroler ini berupa nilai posisi yang
Pengujian dilakukan untuk melihat respons sudut kemiringan pendulum, kecepatan gerak konstan, dan sinyal kontrol pada sistem robot pendulum terbalik beroda dua
Pengujian posisi sudut setiap joint perlu dilakukan untuk mengetahui perbandingan antara posisi sudut yang diinginkan dengan posisi sudut aktual sebelum diberikan
Sine pattern adalah metode yang dapat kita gunakan bersama inverse kinematics untuk menyederhankan variabel kontrol gerak, dimana metode ini akan menghasilkan sekumpulan
Pada penelitian kali ini metode ini digunakan untuk mencari posisi dari robot apabila robot di rotasi terhadap sumbu x dan y output dari kontroler ini berupa nilai posisi yang
Dalam mengontrol derajat kebebasan dari bionic arm dapat dilakukan dengan menggunakan salah satu dari dua metode diantaranya inverse kinematics dan forward kinematics.. Namun, saat ini
