Laporan Pengamatan GPS Geodetik Sungai
Teks penuh
Gambar




Garis besar
Dokumen terkait
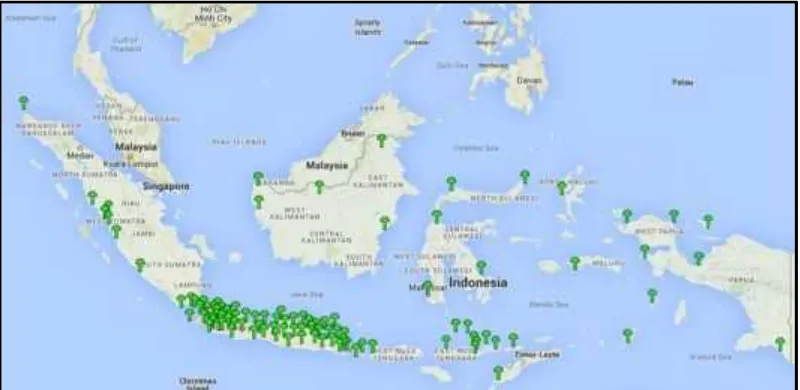
Salah satu aplikasi GPS yaitu pelacakan keberadaan lokasi kendaraan menggunakan GPS receiver yang menerima data posisi kendaraan dari satelit, dan layanan SMS
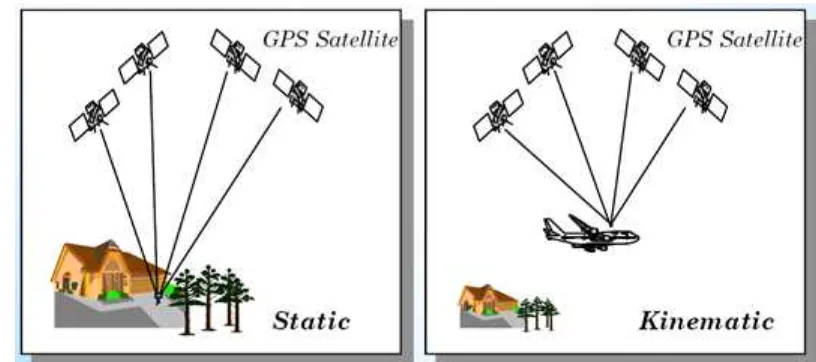
Untuk mengatasi hal ini, penentuan posisi pengamat dilakukan dengan melakukan pengamatan terhadap beberapa satelit sekaligus secara simultan, dan tidak hanya terdapat
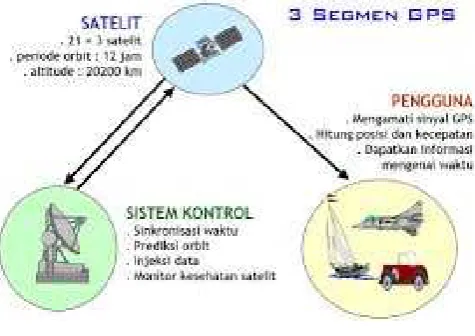
GPS adalah singkatan dari Global Positioning System yang merupakan sistem untuk menentukan posisi dan navigasi secara global dengan menggunakan satelit.. Sistem GPS pertama
ditangkap oleh receiver , dan lemahnya posisi geometri satelit. Tingkat ketelitian posisi pada survei GPS akan bergantung pada bagaimana cara memperlakukan faktor-faktor
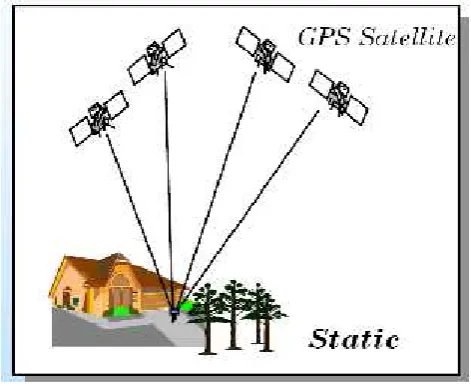
Pada prinsipnya survey GPS bertumpu pada metode penentuan posisi statik secara diferensial dengan menggunakan data fase, Dalam hal ini pengamatan satelit GPS
Selain itu terdapat GPS receiver yang berfungsi untuk menentukan posisi kendaraan dengan bantuan beberapa satelit. Data GPS tersebut akan diterima dan diolah oleh
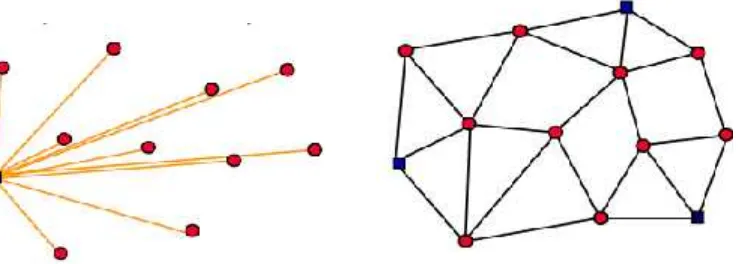
Tugas akhir ini mengkaji tentang penentuan posisi geodetik menggunakan kombinasi metode GPS dan Total Station yang dihitung menggunakan algoritma di sistem koordinat proyeksi
ditangkap oleh receiver , dan lemahnya posisi geometri satelit [Brinton, et al. Tingkat ketelitian posisi pada survei GPS akan bergantung pada bagaimana cara
