SISTEM PENDETEKSI JATUH BERBASIS SENSOR GYROSCOPE DAN SENSOR ACCELEROMETER MENGGUNAKAN BACKPROPAGATION
Teks penuh
Gambar


Dokumen terkait
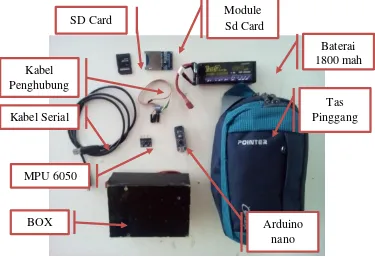
dapat kita gunakan untuk melakukan transfer data baik antara mikrokontroler.. maupun dengan modul-modul eksternal termasuk PC yang memiliki
untuk mengetahui nilai percepatan dan kecepatan sudut tidak dengan cara komputasi algoritma Direct Cosine Matrix yang terdapat dalam program Arduino, karena
[r]
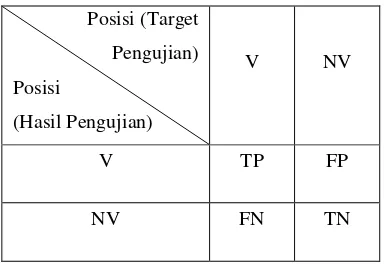
Parameter toleransi galat yang diambil untuk tren pemilihan produk operator di masa yang akan datang adalah dengan melihat rata-rata akurasi proses checking, sehingga didapat
Nilai data yang ada pada sensor akan di proses menggunakan metode fuzzy untuk mendapatkan data output sesuai dengan hasil pemetaan data yang akan di eksekusi oleh actuator, actuator
Untuk mendapatkan status bahaya dengan kelembaban lebih dari 51% dan terjadi pergeseran tanah, maka dilakukan simulasi dengan menyiramkan air ke prototype longsor yang
Sesuai dengan judul yang disusun oleh penulis yaitu mengenai sistem peringatan dini bencana longsor menggunakan sensor accelerometer dan sensor soil moisture berbasis Android,
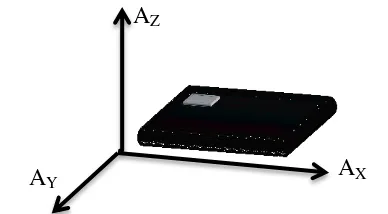
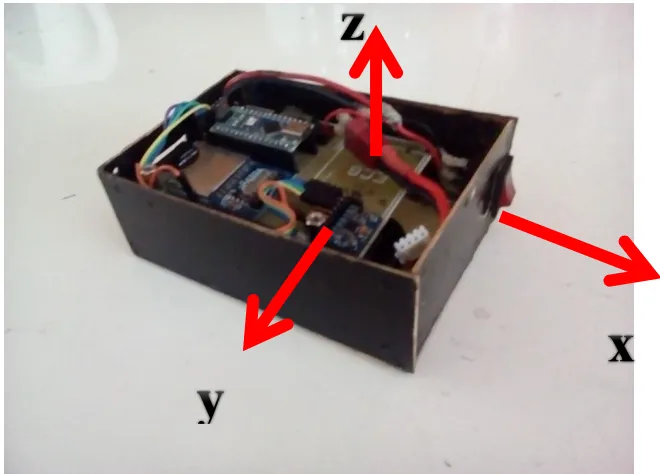
Untuk dapat mengetahui kendaraan secara keseluruhan, yaitu pada enam derajat kebebasan yang terdiri dari tiga data posisi dan tiga data rotasi, maka diperlukan suatu
