HALAMAN JUDUL - Perancangan Kontrol Stabilitas Hexapod Robot Menggunakan Metode Neuro-Fuzzy - ITS Repository
Teks penuh
Gambar

Dokumen terkait
Perumusan masalah yang dibahas dalam Tugas Akhir ini adalah pengaturan kecepatan motor induksi tiga phasa dengan Direct Torque Control (DTC) berbasis kontroler Neuro
Sinyal kontrol atau torsi referensi yang dihasilkan kontroler, torsi yang dibangkitkan pada motor, dan respon kecepatan motor induksi, juga ditampilkan dalam satu
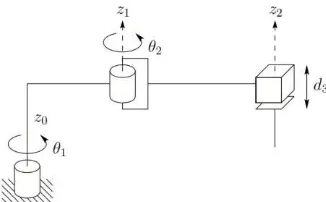
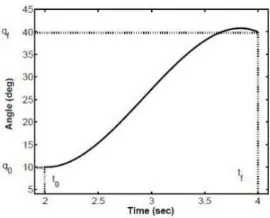
Pada tahap ini dilakukan desain sistem fuzzy berupa nilai-nilai theta yang didapat dari tahap pemodelan sistem, sehingga akan diperoleh nilai theta 1 pada tiap solusi sesuai
Dari hasil pengimplementasian perencanaan lintasan pada mobile robot Qbot menggunakan metode Radial Basis Function dengan kontroler PID Fuzzy dapat disimpulkan bahwa plant
Dari posisi home menuju ruangan yang terdapat lilin menggunakan algoritma telusur dinding kiri, hal ini dialkukan karena dengan menggunakan algoritma ini maka robot akan
1) Metode Fuzzy Logic Controller dapat digunakan untuk mengatur pergerakan dari motor DC dan diimplementasikan pada plant kontrol posisi lengan robot 1DOF. 2)
Pengujian dilakukan untuk melihat respons sudut kemiringan pendulum, kecepatan gerak konstan, dan sinyal kontrol pada sistem robot pendulum terbalik beroda dua
Posisi robot leader dan follower yang selalu berubah dikarenakan perpindahan posisi mengakibatkan terjadinya perubahan data berupa selisih sudut dan jarak.
