Rancang bangun prototype mobil otomatis yang dapat membedakan warna menggunakan konsep robot line follower.
Teks penuh
Gambar

Dokumen terkait
Penelitian ini menggunakan mikrokontroller Arduino Uno sebagai chip utama. Masukan dari robot yang dibangun berasal dari masukan intensitas cahaya sensor photodioda sebagai
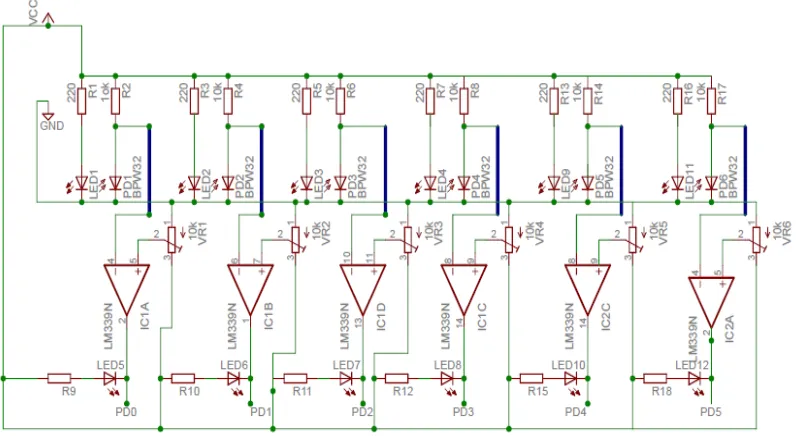
Pengujian rangkaian pengirim yang akan dipakai, yaitu menentukan warna LED super bright yang akan dipakai pada rangkaian pengirim agar sensor dapat mendeteksi jalur
menu tombol. Gambar 3.2 Diagram Blok Sistem.. TUGAS AKHIR RANCANG BANGUN ROBOT... HENDRIK JUNAEDI Prinsip kerja sensor garis adalah transmitter memancarkan cahaya yang akan
yang berfungsi sebagai saklar terkendali cahaya dimana prinsip kerja nya menerima cahaya pada basis dalam kondisi mati [6]. Sebuah sensor terdiri dari 2 buah led
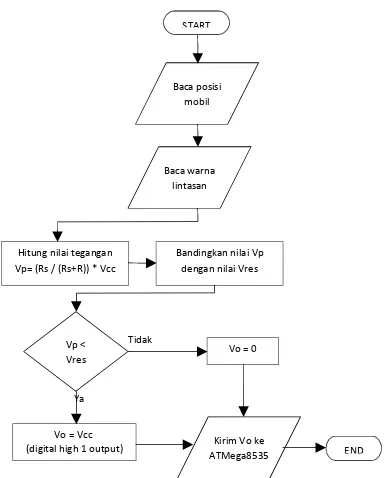
Cara kerja dari sistem robot line follower secara umum ialah dimulai dari pembacaan lintasan atau garis oleh sensor photodiode berserta LED yang mana intensitas pantulan
Hasil akhir dari tugas akhir ini adalah sebuah desain kendali logika yang dapat di implementasikan pada robot mobil wall follower yang dibuat dengan memanfaatkan
RANCANG BANGUN ROBOT LINE FOLLOWER PEMADAM API MEMANFAATKAN FLAME SENSOR DAN BLUETOOTH BERBASIS ARDUINO Badrut Tamam1, Jusuf Bintoro2, Pitoyo Yuliatmojo3 1 Mahasiswa Prodi
