FINAL PROJECT DIGITAL POWER SUPPLY BASED ON MICROCONTROLER ATMEGA8535
Teks penuh
Gambar
![Gambar 2.1. Konfigurasi Pin Mikrokontroler ATmega8535 [3]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/22.595.100.527.69.619/gambar-konfigurasi-pin-mikrokontroler-atmega.webp)
![Gambar 2.16. Rangkaian internal LM317 [12]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/43.595.97.517.193.628/gambar-rangkaian-internal-lm.webp)
![Gambar 2.17. Rangkaian dasar regulator LM317 [12]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/44.595.91.529.85.668/gambar-rangkaian-dasar-regulator-lm.webp)
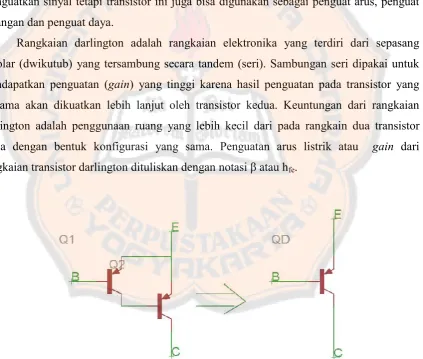
![Gambar 2.20. Konfigurasi Transistor Darlington [10]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/46.595.91.520.77.590/gambar-konfigurasi-transistor-darlington.webp)
![Gambar 3.2. Rangkaian osilator ATmega8535 [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/48.595.86.528.282.607/gambar-rangkaian-osilator-atmega.webp)
![Gambar 3.3. Rangkaian reset ATmega8535 [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1797764.2098153/49.595.88.523.331.746/gambar-rangkaian-reset-atmega.webp)
Dokumen terkait
Kegiatan Usaha Bergerak dalam bidang usaha Pengembangan Real Estat, Golf dan Country Club Jumlah Saham yang ditawarkan 3.209.687.973 Saham Biasa Atas Nama Seri B dengan Nilai
Adapun tujuan utama dalam pembuatan karya ini merupakan suatu keinginan untuk mentransformasikan salah satu kearifan lokal Gorontalo yaitu kisah nabi Ayyub AS
Ketika suatu reaksi kimia berlangsung, maka akan terjadi perubahan komposisi dan terbentuk zat baru yang mungkin memiliki warna yang berbeda.. Contoh reaksi kimia
menghasilkan kadar air irisan ubi kayu yang rendah, serta suhu dan lama pengeringan akan berpengaruh terhadap laju penguapan air irisan ubi kayu, semakin tinggi
[r]
Sedangkan penambahan tepung kentang dalam es krim brokoli menghasilkan overrun , viskositas, kekerasan, time to melt , vitamin C, aktivitas antioksidan, total fenol,
Dalam SEMA tersebut tertulis ―Dalam hal putusan Badan Arbitrase Syariah tidak dilaksanakan secara sukarela, maka putusan tersebut dilaksanakan berdasarkan perintah Ketua
bangunan-bangunan atas tanah yang bukan miliknya sendiri dengan jangka waktu paling lama 30 tahun tersebut dalam Pasal 39 UUPA. Sedangkan mengenai Hak Pakai sebagai obyek
