PROTOTYPE PENGGERAK PINTU PAGAR OTOMATIS BERBASIS ARDUINO UNO ATMEGA 328P DENGAN SENSOR SIDIK JARI
Teks penuh
Gambar


Dokumen terkait
Kemudian data dari sensor akan diolah oleh mikrokontroler R3 Arduino UNO dan selanjutnya palang pintu perlintasan akan menutup dengan otomatis2. Disertai dengan
Telah dilakukan implementasi system OTP sebagai Key penggerakan kunci pintu berbantuan Arduino UNO, melalui (a) pemasangan Arduino software dan aplikasi berbasis app
Pada penelitian ini membahas perancangan purwarupa pengendali pintu pagar rumah otomatis dengan menggunakan mikrokontroller arduino dan modul WiFi ESP8266
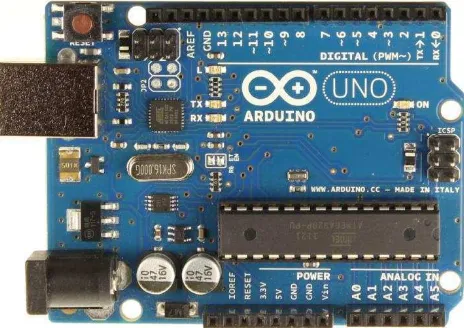
Alat ini menggunakan Mikrontroler Arduino Uno dengan sumber arus yang berasal Modul Breadboard Power Supply MB102 dengan tegangan input 5V/DC, Dalam
Penelitian tentang saklar otomatis berbasis Light Dependent Resistor LDR pada mikrokontroler Arduino Uno, tujuan dari penelitiannya tersebut yaitu untuk membuat saklar otomatis dengan
Penelitian ini bertujuan untuk membuat rancang bangun prototype geophone menggunakan sensor piezoelektrik berbasis Arduino uno R3 dan mengetahui geophone yang telah dirancang dapat
Berdasarkan permasalahan diatas maka penulis tertarik untuk mengangkat permasalahan tersebut yang penulis tuangkan dalam tugas akhir dengan judul” PROTOTYPE SISTEM KEAMANAN PINTU RUMAH
E-mail Addres: dianamargarini@gmail.com Rancang Bangun Prototipe Keamanan Ruang Laboratorium dengan Pintu Otomatis Menggunakan Sensor Suhu MLX90614 Berbasis Arduino Atmega 2560
