Pengendalian Motor Induksi 1 Phasa Berbasis Programmable Logic Controller (PLC).
Teks penuh
Gambar



Dokumen terkait
Dengan demikian, di kumparan rotor akan terinduksi tegangan karena kumparan rotor merupakan loop tertutup, maka akan mengalir arus di kumparan rotor tersebut yang
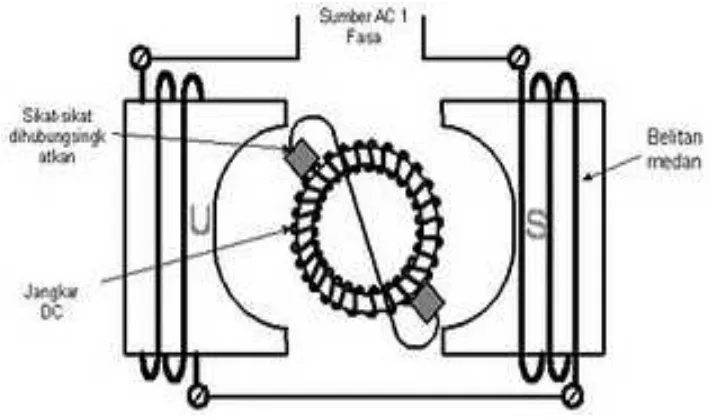
Jika sumber tegangan tiga phasa dipasang pada kumparan stator maka akan timbul medan putar yang memotong batang konduktor pada rotor sehinggga mengakibatkan timbulnya
Motor induksi adalah motor listrik arus bolak balik yang putaran rotornya tidak sama dengan putaran medan statornya, dengan kata lain putaran rotor dengan putaran medan pada
tegangan yang diinduksikan pada rangkaian rotor sehingga tidak ada arus. yang mengalir
Untuk mengetahui gejala kerusakan yang akan terjadi pada kumparan stator dapat dilakukan dengan mengamati besarnya arus listrik yang mengalir pada kumparan stator dengan
Pada kumparan primer akan mengalir arus jika kumparan primer dihubungkan ke sumber tegangan bolak-balik, sehingga pada inti tansformator yang terbuat dari bahan
Prinsip kerja motor induksi 3 fase berdasarkan induksi elektromagnetis, yakni apabila belitan/kumparan stator diberi sumber tegangan bolak- balik 3 fase, maka arus
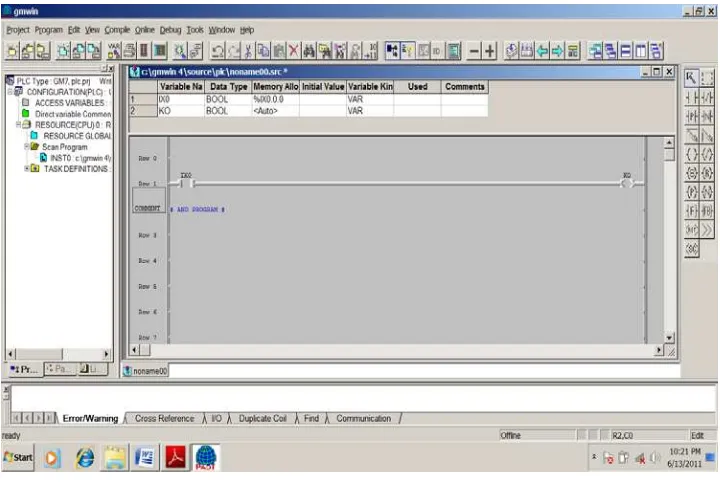
METODE PENELITIAN Pembuatan Blok Diagram Diagram blok Pengoperasian motor induksi tiga phasa menggunakan metode starting direct on line DOL, starting star-delta dan starting
