A Low Cost 4 DOF Remotely Operated Underwater Vehicle Integrated With IMU and Pressure Sensor.
Teks penuh
Gambar

Dokumen terkait
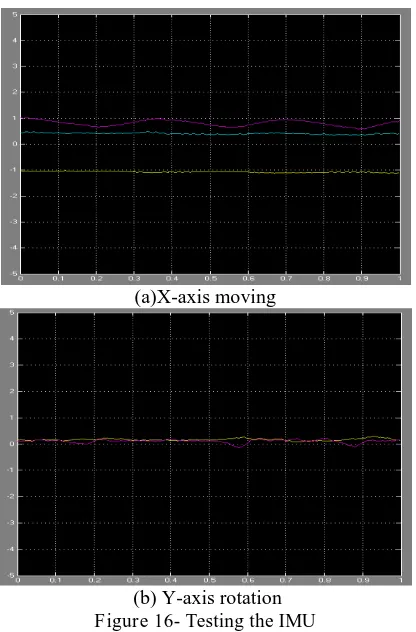
The integrated sensor combination has been developed and it consists of pressure sensor, Inertial Measurement Unit (IMU), digital compass and temperature sensor
Observer based output feedback tuning for underwater remotely operated vehicle based on linear quadratic performance.. Mohd Shahrieel Mohd Aras , Shahrum Shah Abdullah ,
Synchronization of Compass Module with Pressure and Temperature Sensor System for Autonomous Underwater Vehicle (AUV) Mohamad Haniff Harun a, 1 , Mohd Shahrieel Mohd Aras b ,
Therefore, in order to have a good vision and convenient job underwater, an adjustable vision of camera with Graphical user interface (GUI) of remotely operated underwater
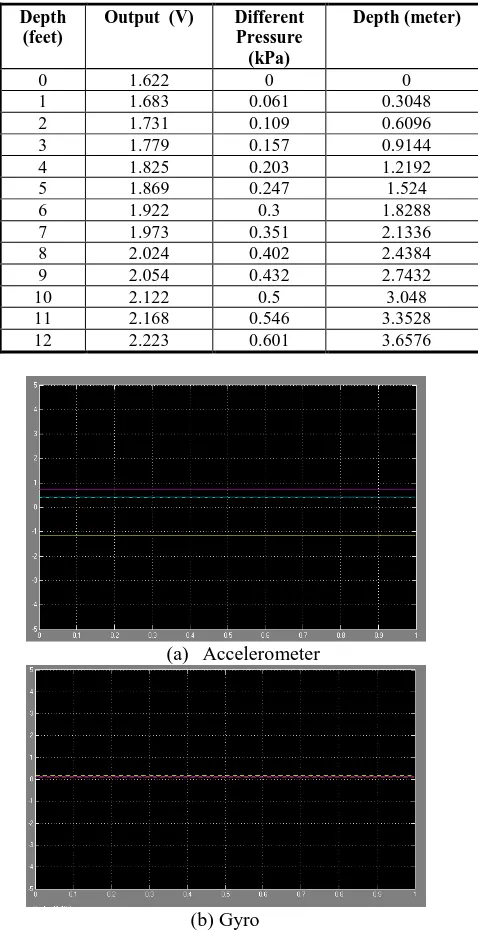
The final stage involves analyses of the data pressure obtain from the experiment of both pressure sensor systems at three different places which are in water tank
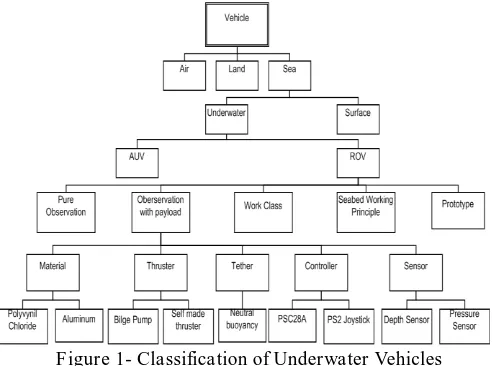
ROV(remoteoperating vehicle) is one type of underwater robot electric water powered with thrusters(thruster)have some hydraulic or electrical components such as
