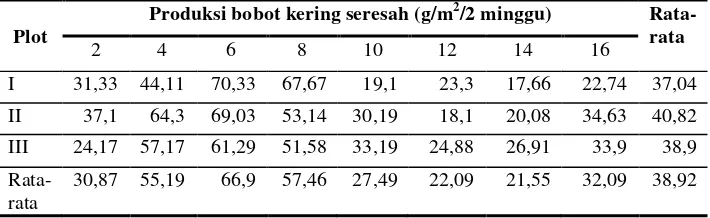
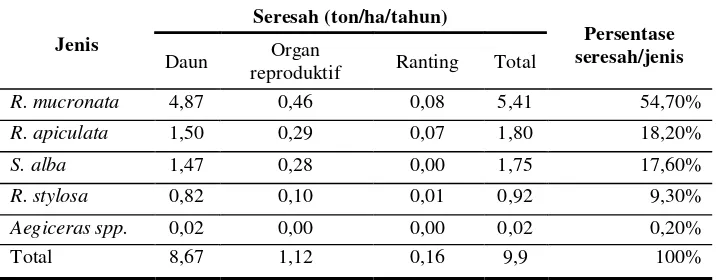
PRODUKSI SERESAH PADA TEGAKAN HUTAN DI BLOK PENELITIAN DAN PENDIDIKAN TAMAN HUTAN RAYA WAN ABDUL RACHMAN PROVINSI LAMPUNG
Teks penuh
Gambar

Dokumen terkait
Penelitian ini bertujuan untuk menganalisis besarnya biaya, penerimaan dan pendapatan usahatani jamur kuping, mengatasi efisiensi usahatani jamur kuping, menganalisa gross
Tujuan penelitian adalah untuk mengetahui perbedaan keragaman jenis tangkapan nelayan, perbedaan pendapatan nelayan, perbedaan kesempatan kerja dan berusaha nelayan sebelum
Penelitian ini bertujuan: (1) untuk mendeskripsikan pelaksanaan pembelajaran matematika dengan pendekatan Pembelajaran Matematika Realistik Indonesia (PMRI) dalam upaya
Penelitian ini bertujuan untuk menghasilkan media pembelajaran konsep luas bidang datar berbasis perangkat lunak geogebra yang valid, praktis, dan mempunyai potensi efek
Dari tabel di atas dilihat bahwa skor rata-rata hasil belajar matematika siswa kelas VIII SMP Negeri 2 Wonomulyo kabupaten Polman sebesar 67,13. Dengan rentang skor 51 ini
Teknik bertanya merupakan cara yang digunakan oleh guru untuk memancing respon siswa untuk berbicara dan mengungkapkan pendapat atau pemikiran siswa, bertanya juga
Dari sifat fisiko kimia tersebut menunjukkan bahwa minyak yang mengandung asam lemak tidak jenuh tinggi memiliki titik leleh, bilangan penyabunan, densitas, viskositas dan
2) Dengan menggunakan metode Fuzzy Logic modelSugeno robot dapat mengontrol sistem navigasinya dengan menghitung jarak robot dari dinding dengan fungsi keanggotaan kemudian
