Auto Tuning PID Berbasis Metode Osilasi Ziegler-Nichols Menggunakan Mikrokontroler AT89S52 pada Pengendalian Suhu
Teks penuh
Gambar
Dokumen terkait
Di dalam tulisan ini disajikan pokok-pokok bahasan yang meliputi implementasi kontrol PID ( Proportional Integral Derivative ) pada penstabil suhu ruangan yang menggunakan
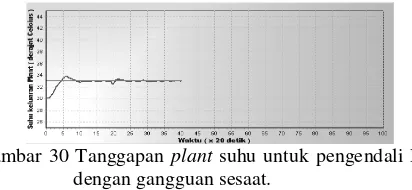
Hasil dari penelitian diketahui bahwa sistem pengendalian suhu menggunakan kendali auto tuning PID dengan kontrol PLC dapat dilakukan, didapatkan kendali suhu yang
Hasil dari penelitian diketahui bahwa sistem pengendalian suhu menggunakan kendali auto tuning PID dengan kontrol PLC dapat dilakukan, didapatkan kendali suhu yang
Kontrol PID ( Proportional Integral Derivative) yang digunakan pada robot kapal selam ini berfungsi untuk mempertahankan posisi pada kedalaman tertentu dan mengatur
Perancangan kontrol PID pada sumbu elevasi alat penggerak antena dilakukan untuk menentukan nilai Kp, Ti, dan Td yang menghasilkan respon sistem yang memiliki
Kontrol PID ( Proportional Integral Derivative) yang digunakan pada robot kapal selam ini berfungsi untuk mempertahankan posisi pada kedalaman tertentu dan mengatur
Model kontrol kecepatan motor DC ini dirancang dengan menggunakan beberapa kontrol, seperti pengendali PID, PID Ziegler-Nichols dan Auto-tuning PID control Matlab.. Hasil
Setelah semua nilai dimasukkan, proses pengontrolan temperatur dengan menggunakan aksi kontrol PID dilakukan dengan menekan tombol menu 2 dan menampilkan hasilnya
